典型作战场景下的分布式协同作战关键技术发展综述
以下文章来源于空天防御在线,作者空天防御在线
来源:空天防御在线
作者:谭左红, 万小博, 刘伟, 潘通林, 樊琎
摘要:随着以ChatGPT、DeepSeek为代表的人工智能大模型在武器装备领域的深度融合,分布式协同作战正以革命性态势重塑未来战争范式。本文围绕分布式协同作战理念,系统阐述其体系框架下的态势感知、任务规划、战损评估及数据链信息传递,剖析有人/无人平台协同、无人蜂群、防空反导等典型作战场景的关键技术,并探讨其发展趋势,以期为面向未来作战的技术研发与体系构建提供参考。
关键词: 未来战争; 体系作战; 人工智能; 分布式协同
0 引言
近年来,人工智能、大数据、网络通信与电磁频谱技术的交叉赋能,推动了以“认知化、动态化、分布化”为特征的新型作战样式加速形成。分布式协同作战通过异构平台的自适应组网,构建具备智能感知与决策能力的任务系统,实现从装备对抗到“信息-火力”体系对抗的范式转变,其打击模式也从时敏目标精确打击向多目标蜂群式饱和攻击演进,最终达成效费比最优化的作战效能。
本文从分布式协同作战的理念内涵、体系框架、关键技术及发展趋势展开多维分析,以期为我国未来作战体系建设提供理论支撑。
1 分布式协同作战理念
针对强对抗环境下高价值武器平台生存能力不足、系统架构僵化等问题,美军率先依托有人/无人作战平台集群,提出分布式协同作战理念。
该理念核心在于将复杂装备系统的功能进行解耦,分布式部署于小型化、低成本的异构有人/无人平台,通过全域通信网络实现自主协同与智能决策,以体系化作战完成单平台难以胜任的任务。这种作战模式在降低装备损耗成本的同时,显著提升体系灵活性与战场适应性,如图1所示的海上分布式协同作战概念通过多平台任务分工与资源共享,形成覆盖侦察、打击、评估的闭环作战链路。
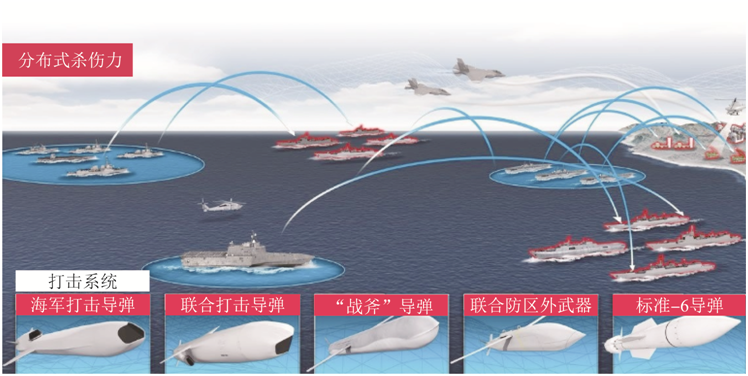
Fig.1 Conceptual diagram of distributed collaborative operations at sea
2 分布式协同作战体系框架
分布式协同作战体系框架是现代军事指挥系统的核心架构,通过整合态势感知系统、任务规划系统、战毁评估系统及数据链信息传递系统等关键模块,实现战场资源的动态协同与高效决策。其工作流程为:首先通过态势感知系统实时融合多源战场数据构建全局态势图,经由数据链系统将信息传输至任务规划系统,后者运用智能算法生成作战方案并动态分配任务至作战单元;战毁评估系统则对打击效果进行量化分析并将结果反馈至态势感知与任务规划系统,形成闭环控制流程。其总体架构如图2所示。
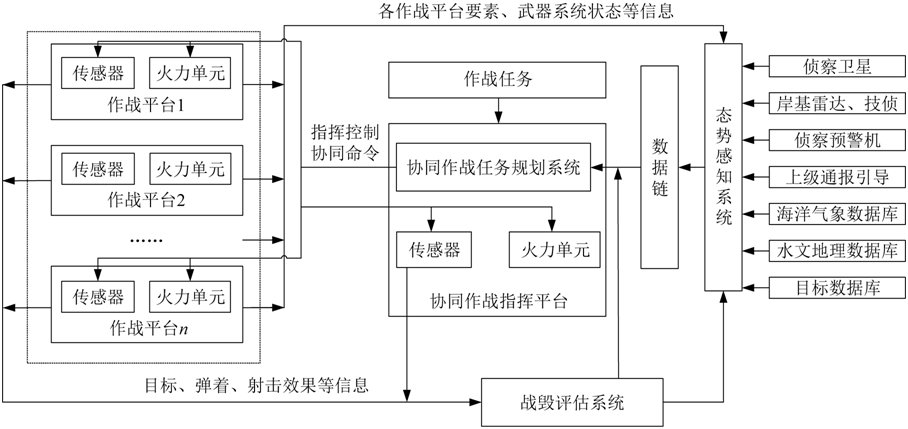
Fig.2 Overall architecture diagram of distributed collaborative combat
2.1 态势感知系统
作为未来战场的“数字神经中枢”,态势感知系统通过多源异构节点构建全域监测网络即天基多光谱卫星、空基无人机蜂群与地基传感器实现全天候无缝监视,并结合云端AI算力实时融合电磁信号、地理信息与开源情报,对战场环境进行实时态势评估。水下分布式传感器网络如图3所示,其通过多域节点协作与通信,实现对潜艇目标的精准定位与态势推演。
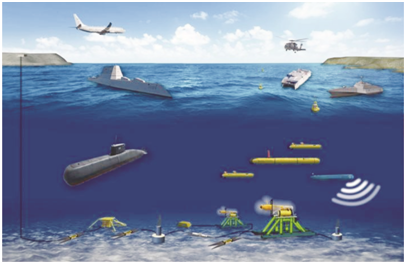
Fig.3 Underwater distributed sensor network
2.2 任务规划系统
任务规划系统作为作战流程的“智能大脑”,主要解决动态环境下的任务分配与航迹优化。基于战场态势输入,该系统通过分层任务分解模型(如任务-能力匹配矩阵)实现多平台资源分配,继而生成最优航迹。针对任务执行过程中目标信息实时变化,系统支持任务动态调整:当局部战场约束改变时,通过多种智能算法实现航迹的局部重规划,确保任务执行的鲁棒性。美军任务规划系统架构如图4所示,其体现从战略级任务分配到战术级航迹优化的分层决策机制。
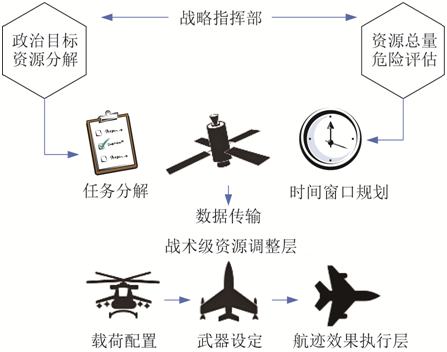
Fig.4 Schematic diagram of the US Air Force mission planning system
2.3 战毁评估系统
战毁评估系统通过多源数据融合(如光学/红外图像、雷达回波信号)构建目标状态评估模型,主要指标包括评估延迟、虚警率与漏报率。基于模糊逻辑的综合评估算法可有效处理传感器数据的不确定性,并结合差分进化算法(Differential Evolution Algorithm,DEA)优化评估阈值,提升毁伤判定精度。无人机集群协同评估模式如图5所示,其通过多视角侦察与数据交叉验证,实现对目标的毁伤等级量化评估,以为后续打击决策提供依据。

Fig.5 Drones for conducting battlefield assessments
2.4 数据链信息传递系统
数据链作为分布式协同的“神经脉络”,主要解决异构平台间的信息高效交互问题。通过构建动态自适应组网协议如时分多址TDMA(Time Division Multiple Access)与自组织网络AODV(Ad hoc On-Demand Distance Vector Routing)的融合机制,实现节点间数据速率与传输延迟的优化平衡。基于信息熵理论的最小共享信息集筛选算法,可从海量数据中提取关键作战要素(如目标坐标、威胁等级),在降低网络负载的同时保障决策所需信息完备性。数据链多域通信架构如图6所示,其集成空基卫星、地基通信网与平台自组网,形成抗干扰能力强的分布式信息传输体系。
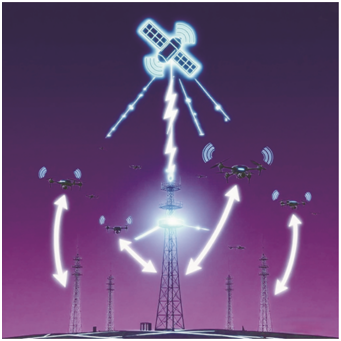
Fig.6 Schematic diagram of multi-domain communication in the data link
3 典型作战场景下的分布式协同作战关键技术
3.1 有人/无人平台协同作战关键技术
3.1.1 协同任务分配技术
联合作战中,有人/无人武器系统的任务分配面临多重难题:使命空间内任务类型多样、武器平台功能异构、分布广泛且动态关联,导致战场约束条件复杂交织。为突破这一瓶颈,需构建基于知识驱动的分层任务分配体系,其核心是通过 “任务组构建—编队优化”的递进式设计,实现作战资源与任务需求的高效匹配。
(1) 任务组构建:首先对系统要素进行建模,并量化分析无人武器系统的指挥决策能力与任务执行所需的资源能力,从而以“能力代价最小化”为目标,建立任务与平台的匹配模型;通过构建能力矩阵与需求向量的映射关系,筛选最适合作战任务的平台组合,以提升任务组与作战场景的契合度。
(2) 编队构建:任务组初步形成后,结合目标地理分布、资源约束、战场规则等因素,以“目标完成概率最大化”为优化准则,设计编队协同模型;通过地理信息分析与任务效能评估,动态优化平台编队结构,增强复杂环境下的任务执行能力。
3.1.2 任务组分层自主优化调整技术
有人/无人武器系统在优化和调整问题中,使命任务、战场环境、平台状态动态性和不确定性程度较高,战场自主调整适变性、实时性要求较高,且优化调整过程具有多重因果反馈关系,使得优化调整问题更加复杂。
(1) 组内自适应调整:当任务组具备处理能力时,基于历史作战知识与实时态势数据,构建原方案的邻域搜索模型,仅针对受影响的任务目标进行局部优化,以避免全局重构带来的高代价与长时间延迟问题。
(2) 组间协同支援机制:当任务组能力不足时,通过跨组资源调度算法,建立无人平台支援代价的测度函数,区分平台的空闲与非空闲状态,实现低代价资源跨组调配。在此基础上,构建组间邻域搜索模型,以提升系统整体抗干扰能力。
3.1.3 协同侦察控制技术
面向静止与运动目标的多模侦察需求(快速定位、实时跟踪、非实时监视),整合有人/无人平台的载荷优势,构建多维度协同侦察体系,其核心技术主要涉及2方面。
(1) 协同侦察样式设计:研究多角度互补盲区侦察、多波段载荷协同探测、多载荷交替侦察及通信中继增强侦察等模式,以解决单一平台的探测盲区与功能局限问题。
(2) 载荷工作模式优化:建立态势信息与协同探测模式的映射关系,通过设计合理的切换逻辑,实现载荷工作模式的智能控制,以确保有人/无人平台在侦察任务中的高效协作。
3.1.4 协同攻击控制技术
在协同攻击场景中,通常以有人平台作为指控核心,来指挥隐身性能优异但探测能力有限的无人平台实施打击,此法需突破两大关键技术。
(1) 协同火力应用技术:定义包含打击效能、弹药消耗、平台生存概率的多目标效能函数,构建异构火力配置模型。通过优化算法求解最优火力分配方案,以实现对敌方目标的高效打击与己方损耗的最小化。
(2) 制导权移交技术:当无人平台发射导弹后遭遇敌方拦截需规避时,基于候选平台的位置、速度、敌方威胁方位及导弹制导区域等参数,构建优势度评估模型,优选接替制导平台,以确保导弹的命中精度不受平台规避影响。
3.2 无人蜂群作战关键技术
3.2.1 集群协同任务分配技术
无人机蜂群的任务分配是典型的非确定性多项式时间困难问题( Non-Deterministic Polynomial-Time Hardness,NP-hard),需从系统层、任务层、操作层3个维度构建优化体系,以实现宏观资源配置与微观任务执行的协同。
(1) 任务分解与自组织分配:采用“自顶向下”的方法将作战任务拆解为原子任务,再通过群体智能算法实现“自底向上”的动态分配,形成任务分解、能力匹配、编队构型优化的闭环流程,如图7所示。
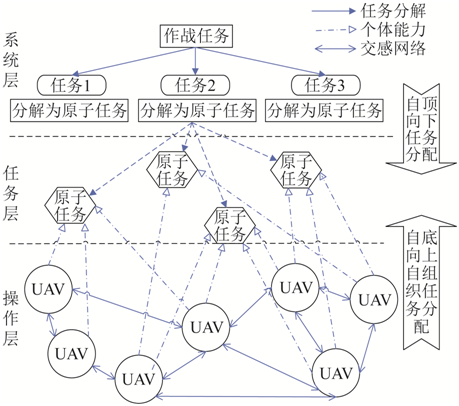
Fig.7 Task decomposition and self-organizing allocation
(2) 模型构建与算法适配:将无人机数量、任务状态、约束条件等要素映射到群体智能算法参数(种群规模、候选解、目标函数),构建包含任务完成率、执行时间、平台负荷的多目标优化模型,借助粒子群优化、蚁群算法等智能算法求解最优分配方案。
(3) 效能评估与迭代优化:建立涵盖任务完成度、资源利用率、抗毁能力的评估指标,对分配方案进行动态验证,以确保蜂群在复杂环境下的任务执行效率。
3.2.2 集群智能自组网技术
在分布式蜂群作战中,无人机作为任务执行单元和通信网络节点的结合体,需构建适应动态拓扑变化的自组织通信网络。其核心在于根据任务需求与平台空间分布,智能分配通信资源,提升信息传输的实时性与可靠性。其研究重点包括动态组网协议设计、抗干扰通信策略及异构节点的协同机制,以解决高速移动中网络拓扑频繁变化导致的通信不稳定问题。分布控制的无人机集群典型信息交互如图8所示。
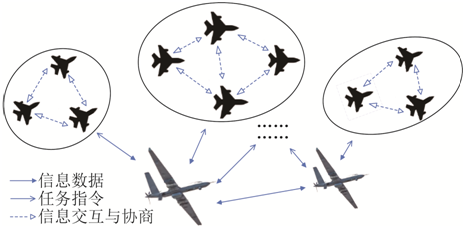
Fig.8 Typical information exchange process and transmission process
3.2.3 集群协同态势感知与数据融合技术
利用蜂群多节点的空间分布优势,可构建多模态探测架构(多机无源探测、收发分置探测、空基移动雷达探测等)来提升全域态势感知能力。针对卫星图像、雷达数据、地理信息等多源异构数据,设计专用数据融合模型,通过时空配准、特征融合等技术来实现战场态势的精准还原,进而为蜂群协同决策提供支撑。不同协同态势感知方式和架构下的数据融合传输流如图9所示。
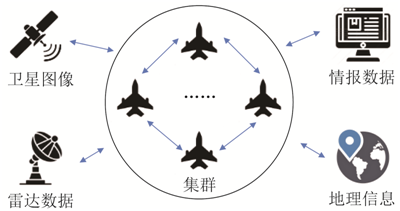
Fig.9 Data fusion transport stream
3.2.4 集群编队飞行与协同控制技术
以下针对同构或异构无人机混编场景,研究编队控制律与安全机制。
(1) 编队控制律设计:结合图论与控制理论,设计编队保持与构型调整算法,以确保多机运动的一致性。
(2) 安全协同技术:开发防相撞自主避障算法、机动包线预先控制策略,从而解决限定时间内的协同飞行控制问题,保障集群在复杂环境下的安全机动。典型无人机集群运动控制流程如图10所示。
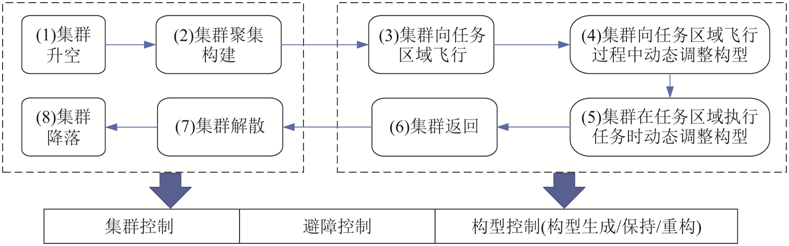
Fig.10 Control process of drone swarm motion
3.3 防空反导分布式作战关键技术
3.3.1 武器虚拟化技术
武器虚拟化技术通过将地理分散的武器装备虚拟化作为逻辑云节点来整合形成统一的作战资源池,这是构建防空反导战术云的核心基础。该技术打破了传统武器系统的紧耦合关系,支持拦截杀伤链的动态重组,从而为分布式协同作战提供资源池化管理的技术路径。
3.3.2 协同作战技术
依托战术云架构,防空反导分布式作战需整合传感器、火力、指控等要素来实现跨域协同,其关键是研究适用于云环境的协同探测、火力分配、制导拦截算法,以解决多平台时间同步、空间配准、决策冲突等问题;主要通过智能算法优化作战资源组合,提升分布式体系的协同效能。
3.3.3 动态拦截联盟规划技术
面对复杂空情,通过传感器—火力—目标的灵活匹配形成临时虚拟拦截联盟,具有分布式作战的典型特征。由此需设计动态资源分配与管理算法,实现联盟快速构建与重组,从而将战场信息优势转化为决策优势,增强体系对抗中的拦截效率与灵活性。
4 发展趋势
4.1 有人/无人平台协同作战发展趋势
(1) 任务多元化与角色转型。当前无人平台多承担侦察监视等支援任务,未来将向打击、干扰、通信中继等多任务拓展;有人平台逐步从一线作战转向后方指挥,形成“有人决策、无人执行”的分工模式,通过功能解耦实现作战效能最大化。
(2) 控制层级上移与自主化升级。随着人工智能技术进步,无人系统将从依赖人工的飞行级控制向具备自主决策能力的任务级、编队级控制演进;人机协同模式将从“人在环中”的实时干预转变为“人在环上”的任务级指令控制,从而显著减轻指挥员负担,提升全域作战指挥效率。
4.2 无人蜂群作战发展趋势
(1) 动态航迹规划进一步优化。战场环境瞬息万变,需针对微小型无人机速度、续航与机动性限制,优化动态环境下的实时航迹规划算法,提升蜂群对威胁规避、路径优化的快速响应能力,从而在生存能力与任务效率间取得平衡。
(2) 指控性能进一步提高。构建基于软件定义网络的蜂群指控架构,研发抗干扰通信协议与动态拓扑管理技术,从而解决高速移动中的网络中断问题。同时,融合行为法、领航法、人工势场法等控制策略,提升编队在复杂场景下的自适应重组能力,以增强指控系统的鲁棒性。
(3) 蜂群作战效能进一步增强。通过标准化接口与协同协议,实现跨平台任务无缝衔接,以确保部分节点损失后任务角色的动态转移,维持蜂群整体作战效能。
4.3 防空反导分布式作战发展趋势
(1) 装备体系通用化与多任务集成。未来防空反导系统将采用模块化、系列化设计,并基于现有型号改进升级,以减少装备种类,实现三军通用与多任务兼容,降低研制、部署与维护成本,更好适应多样化威胁场景。
(2) 防御空间拓展与全域覆盖。随着威胁来源向临近空间、外层空间及网电空间延伸,防空反导系统需构建“超低空-太空”“实体空间-虚拟空间”的一体化防御体系,发展跨域协同探测与拦截技术,以实现对全谱系空天威胁的有效应对。
(3) 开放架构与前沿技术融合。采用开放式系统架构与即插即用技术,打破装备间的技术壁垒,实现跨厂商、跨型号资源的无缝集成。同时,融合太赫兹探测、定向能武器、人工智能识别等前沿技术,提升复杂环境下的抗干扰、高毁伤能力;通过增材制造、智能制造等技术革新降低生产成本、加速装备迭代,推动防空反导作战效能跨越式发展。
5 结束语
分布式协同作战是未来联合作战的重要形态,通过“化整为零”的能力部署与“聚零为整”的体系集成,打破传统作战的平台中心范式,确立“信息主导、网络赋能、体系破击”的新作战逻辑。未来需进一步突破跨域协同机制、智能决策算法、抗干扰通信等瓶颈技术,推动作战体系向自主化、弹性化、全域化演进,为打赢未来智能化战争提供技术支撑。